|
I am a Ph.D. student in the Robotics Institute (RI) at Carnegie Mellon University (CMU), working with Prof. Shubham Tulsiani. My research focuses on building physics-grounded AI agents, video generation via preference-based RL optimization, and differentiable simulation. I am currently collaborating with Microsoft on Computer-Use-Agents (CUA), GUI grounding, Coding Agents, and 4D asset generation research. I graduated with a Master of Science in Robotics (MSR) from the Robotics Institute at Carnegie Mellon University where I worked with Prof. Abhinav Gupta and collaborated with Prof. Pedro Morgado at UW-Madison. Before my Master's, I worked as a Research Assistant at CMU with Prof. David Held at the R-Pad Lab, in collaboration with Pittsburgh-based autonomous driving company, Argo AI. During my Masters at CMU, I had worked on self-supervised representation learning methods for multimodal audio-visual videos and as a RA at CMU, I worked on self-supervised algorithms for real-world 3D LiDAR point clouds. I have served in the organizing committee of WiCV@CVPR 2025, WiCV@CVPR 2024, and DEI Social Event@CVPR 2024. |

|
|
|
|
|
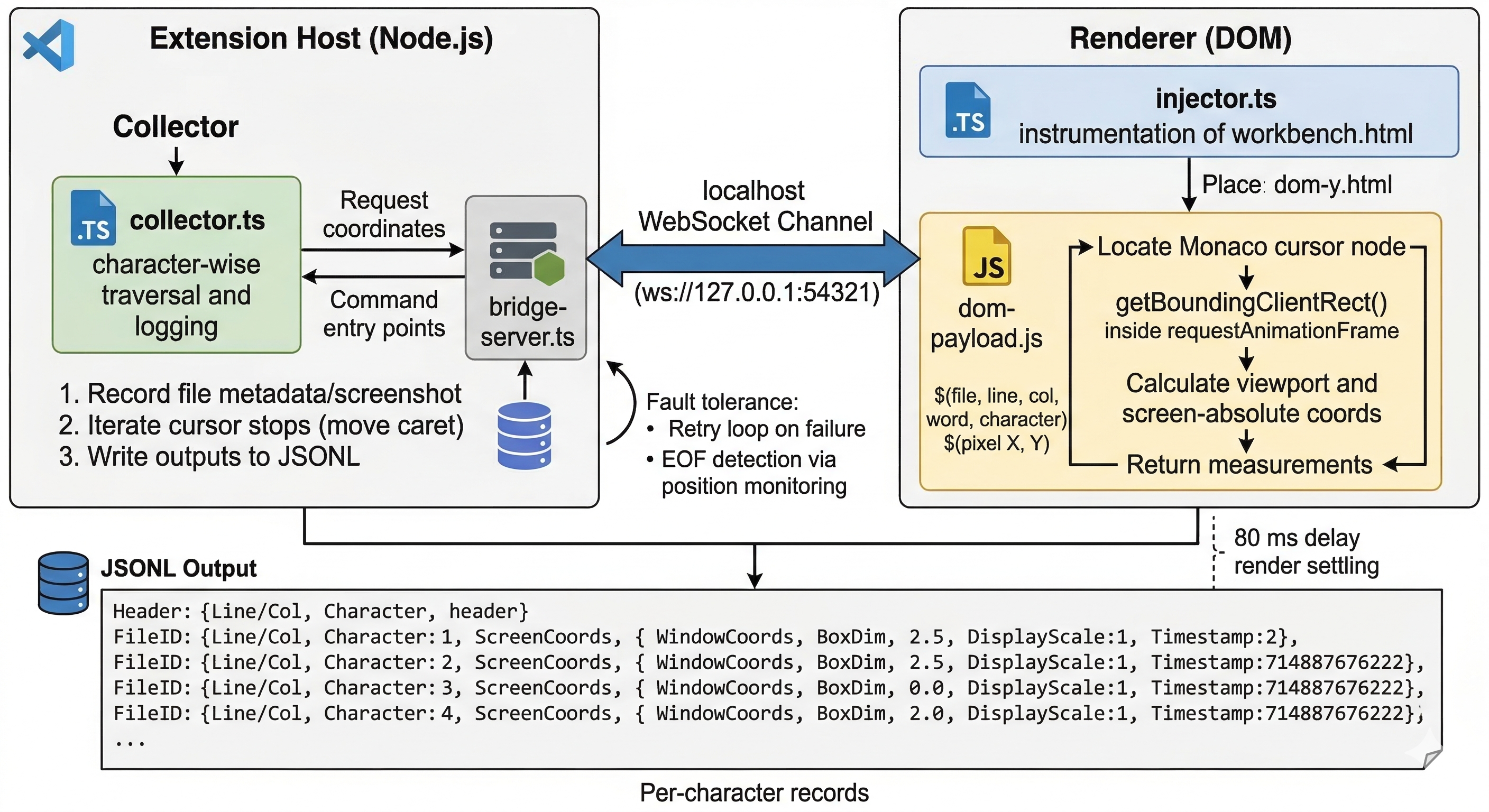
Himangi Mittal, Gaurav Mittal, Nelson Daniel Troncoso, Yu Hu Arxiv / Code We study pixel-precise GUI grounding for Computer Use Agents in dense coding interfaces. Instead of single-shot coordinate prediction, our agent iteratively refines cursor localization using visual feedback from previous attempts, enabling self-correction of displacement errors. Evaluated across GPT-5.4, Claude, and Qwen, multi-turn refinement significantly outperforms single-shot models in click precision and task success. |

|
Su Sun, Cheng Zhao, Himangi Mittal, Gaurav Mittal, Rohith Kukkala, Yingjie Victor Chen, Mei Chen [CVPR 2026] Arxiv Track4DGen is a two-stage framework that integrates foundation point-tracker motion priors into multi-view video diffusion and 4D Gaussian Splatting reconstruction. By enforcing dense feature-level point correspondences during generation and augmenting reconstruction with tracker-derived motion encoding and 4D Spherical Harmonics, it produces temporally stable, text-editable 4D assets surpassing existing baselines. |
|
Himangi Mittal, Peiye Zhuang, Hsin-Ying Lee, Shubham Tulsiani [CVPR 2025] Paper / Arxiv / Webpage / Code UniPhy is a unified latent-conditioned neural model which learns a common latent space to encode the properties of diverse materials. At inference, given motion observations for a system with unknown material parameters, UniPhy allows material inference via differentiable simulation latent optimization. |

|
Himangi Mittal, Nakul Agarwal, Shao-Yuan Lo, Kwonjoon Lee [CVPR 2024] Paper / Arxiv We leverage a large video-language model for anticipating action sequences that are plausible in the real-world. We develop the understanding of plausibility of an action sequence in a large video-language model by introducing two objective functions, a counterfactual-based plausible action sequence learning loss and a long-horizon action repetition loss. |
|
Himangi Mittal, Pedro Morgado, Unnat Jain, Abhinav Gupta [NeurIPS 2022] ECCV 2022 Workshop on Visual Object-oriented Learning meets Interaction (VOLI): Discovery, Representations, and Applications Sight and Sound Workshop (CVPR 2023) Paper / Arxiv / Code / Video We propose a self-supervised algorithm to learn representations from untrimmed, egocentric videos containing audible interactions. Our method uses the audio signals in two unique ways: (1) to identify moments in time that are conducive to better self-supervised learning and (2) to learn representations that focus on the visual state changes caused by audible interactions. |
|
Himangi Mittal, Brian Okorn, Arpit Jangid, David Held [BMVC 2021 - Oral (Selection rate 3.3%)] Paper / Arxiv / Code / Conference Presentation / Webpage A self-supervised method to complete the incomplete, partial point clouds for real-world settings like LiDAR where ground truth complete point cloud annotations are unavailable. We achieve this via inpainting where a region of the point cloud is removed and the network is trained to complete this removed region. |
|
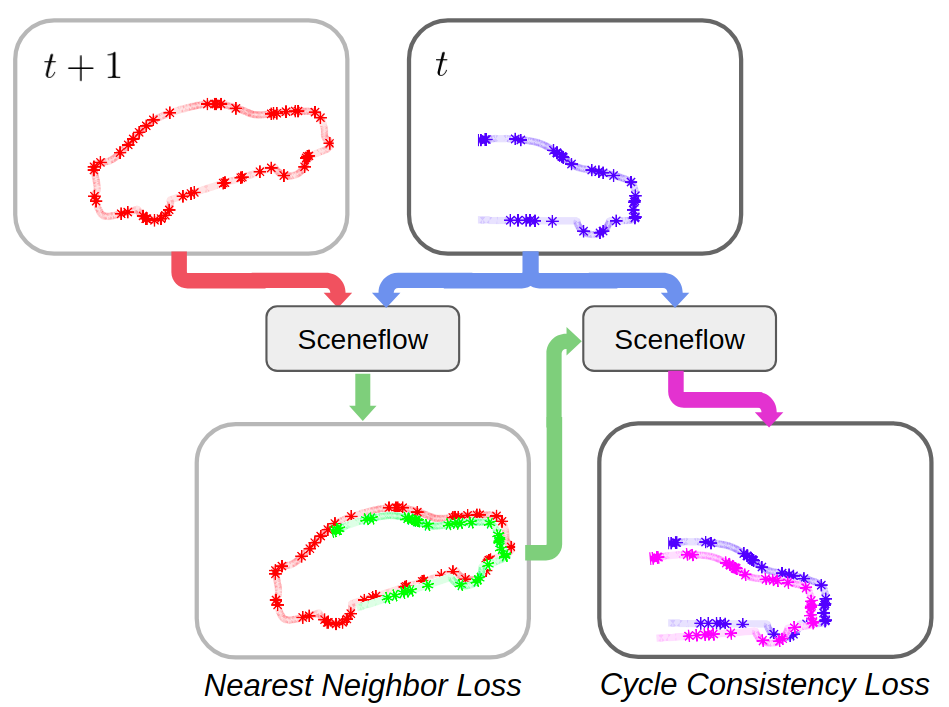
Himangi Mittal, Brian Okorn, David Held [CVPR 2020 - Oral (Selection rate 5.7%)] RSS 2020 Workshop on Self-Supervised Robot Learning Paper / Arxiv / Code / Media article 1 / Media article 2 / Project Page / Video / Short Paper A method of training scene flow that uses two self-supervised losses, based on nearest neighbors and cycle consistency. These self-supervised losses allow us to train our method on large unlabeled autonomous driving datasets. |
|
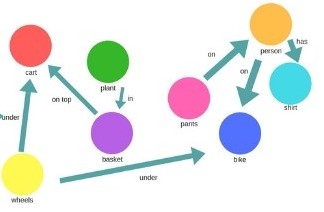
Himangi Mittal, Ajith Abraham, Anuja Arora [International Conference on Big Data Analytics (BDA), 2019] Paper / ArXiv / Code Predicted action and spatial relationships in images between objects detected by YOLO, then combining VGG-Net based visual features and Word2Vec based semantic features. |
|
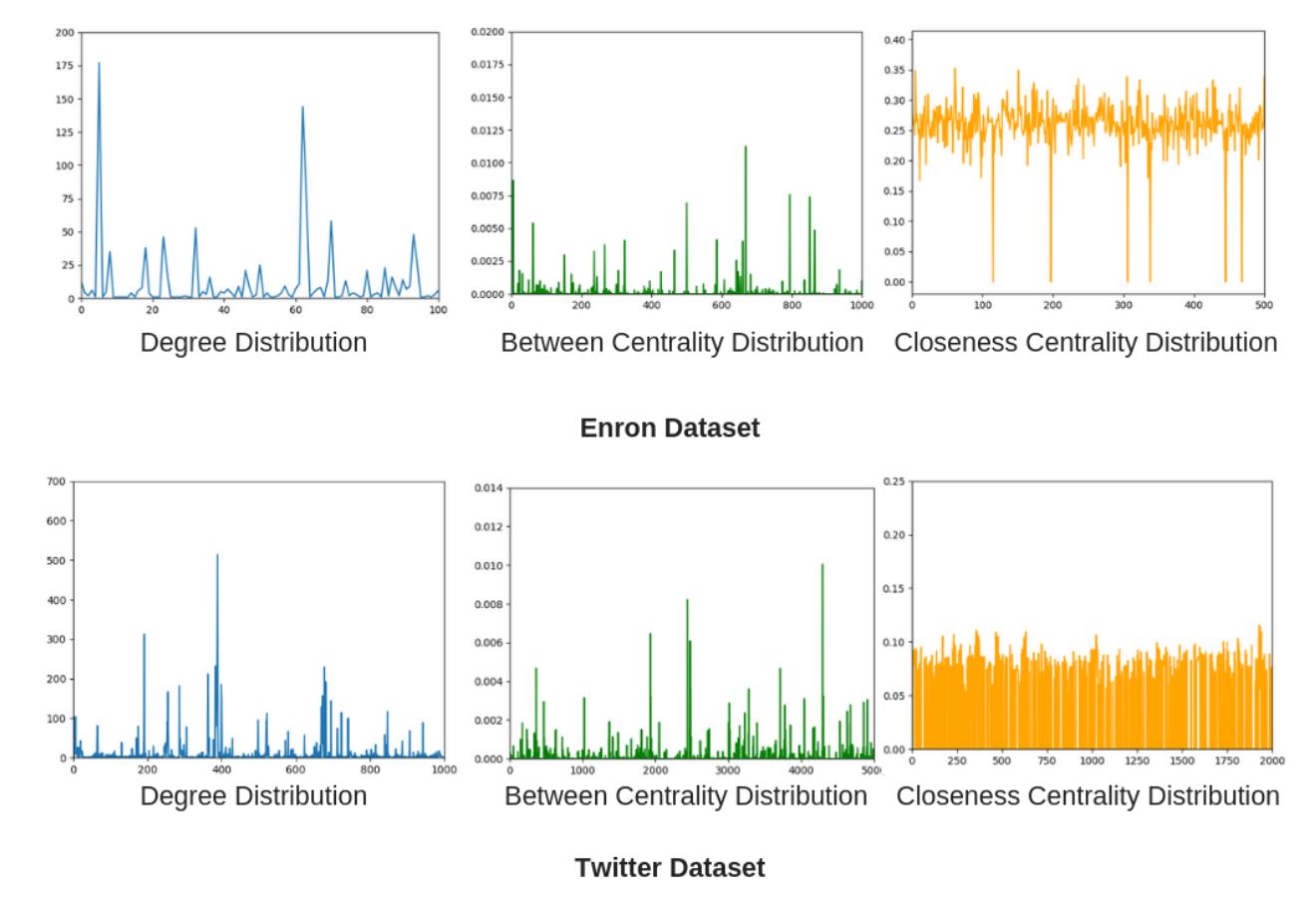
Anshika Chaudhary, Himangi Mittal, Anuja Arora [International Conference on Machine Learning, Big Data, Cloud and Parallel Computing , 2019] Paper / Code A method to capture the anomalous behavior in a social network based on degree, betweenness, and closeness of graph nodes using Graph Neural Networks (GNN) in Keras. |
|
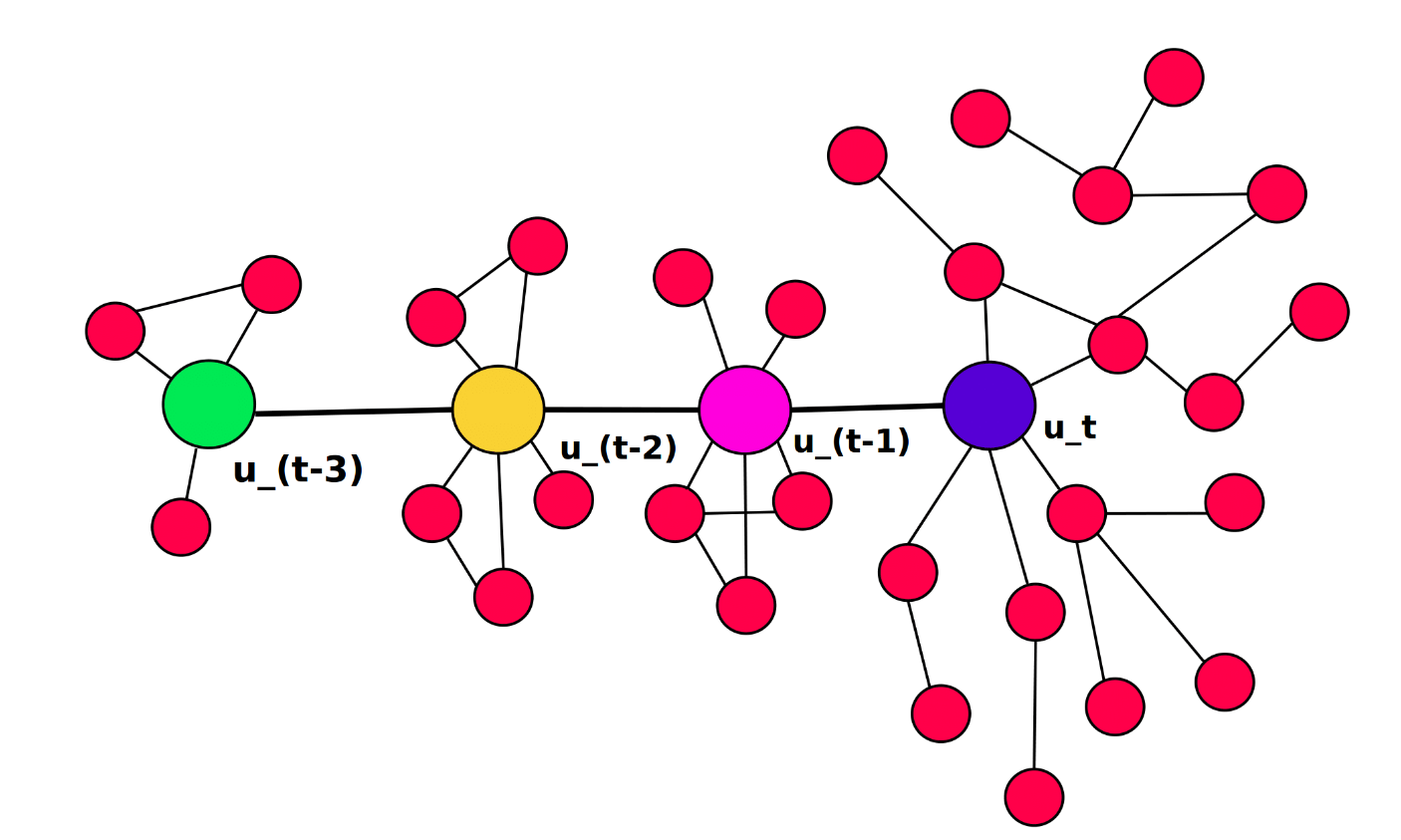
Supriya Pandhre, Himangi Mittal Manish Gupta, Vineeth N. Balasubramanian [ACM India Joint International Conference on Data Science and Management of Data (CoDS-COMAD), 2018] Paper / ArXiv / Code Presents trajectory analysis of spatio-temporal graph nodes using DeepWalk algorithm in NetworkX (Python) for classification and detecting changing points of interest using SVMs. |
|
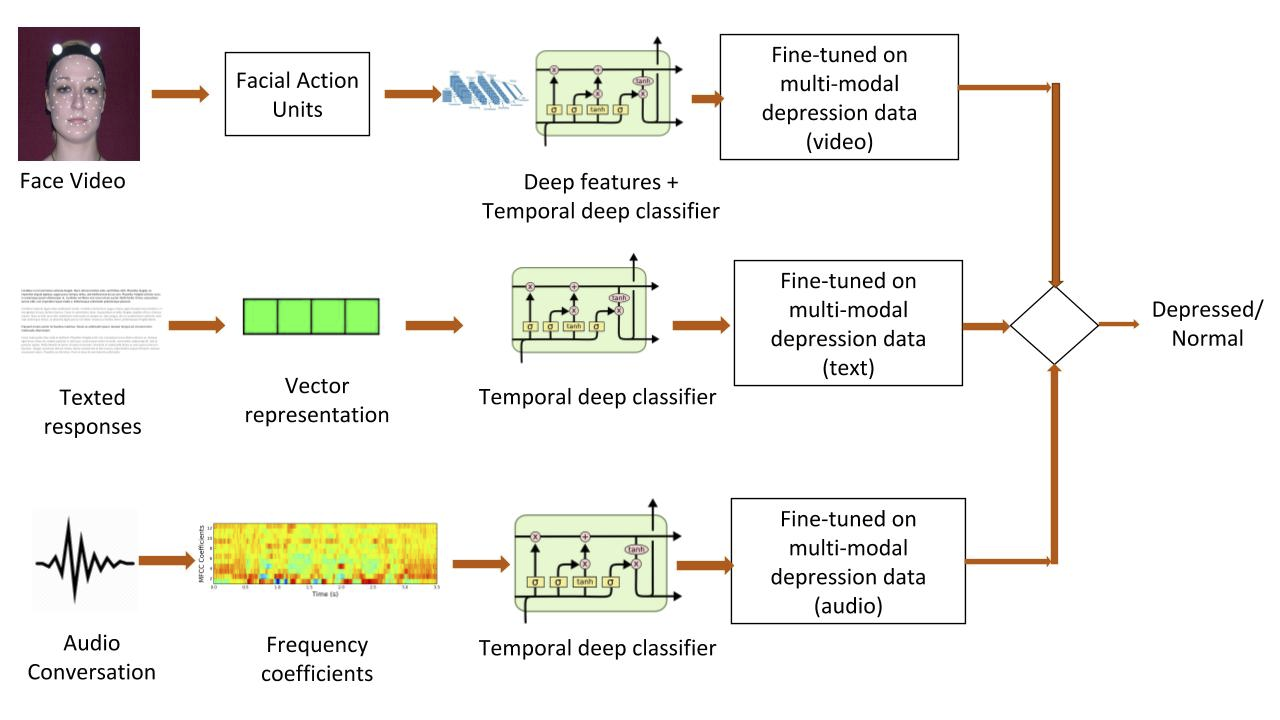
Sahana Prabhu Muraleedhara Himangi Mittal, Rajesh Varagani, Sweccha Jha, Shivendra Singh [Pattern Analysis and Applications Journal] Paper A method for multi-modal depression detection using audio, video, and textual modalities using LSTMs. This work leverages emotions to detect an early indication of depression. |
|
|
|
|
|
Teaching Assistant for 16-720A: Computer Vision (Fall 2025) Teaching Assistant for 16-824: Visual Learning and Recognition (Spring 2024) Teaching Assistant for 16-825: Learning for 3D Vision (Spring 2023) |
|
|